【四】如何设置轻量追踪器,并与Aximmetry对接?
叙事工厂 StoryX CamTrack 配置指南
一、启动程序
双击桌面上的叙事工厂 StoryX CamTrack 图标,即可启动追踪程序。

▲ 图:桌面图标
二、首次运行配置
首次运行前,需要在程序中完成两项核心配置:FreeD 协议(设置追踪数据发送至何处)与世界原点(建立虚实空间的坐标基准)。点击程序主界面上的**"协议设置"**按钮,进入配置页面。

▲ 图:主界面,"协议设置"按钮位置
2.1 FreeD 协议配置
在弹出的配置页面中,点击顶部的 "FreeD 协议" 标签页。

▲ 图:协议设置页面,FreeD 标签
FreeD 是虚拟制作行业中被广泛采用的摄像机追踪数据传输标准协议,它负责将追踪系统实时采集到的摄像机位置与姿态(旋转角度)数据,以标准化格式发送给 Aximmetry、虚幻引擎等虚拟制作软件,是追踪系统与下游渲染软件协同工作的通信基础。各项参数说明如下:
① 启用 FreeD
勾选此选项,以激活 FreeD 数据发送功能。若未勾选,追踪程序将不会向任何外部软件发送追踪数据。
② 目标 IP
目标 IP 是接收追踪数据的计算机的网络地址。若 Aximmetry、虚幻引擎等虚拟制作软件与追踪程序运行在同一台电脑上,请填写 127.0.0.1。127.0.0.1 是本机回环地址,表示数据在本机内部直接传输,无需经过任何网络设备。若虚拟制作软件运行在局域网中的另一台电脑上,则填写那台电脑的局域网 IP 地址(通常形如 192.168.x.x),并确保两台电脑处于同一局域网下。
③ 端口
填写 40001。端口号是计算机区分不同数据通道的编号,类似于同一栋楼里不同房间的门牌号。通常在 20000 到 40000 之间任意选取均可,但必须确保此处填写的端口号与接收端(Aximmetry 或虚幻引擎)中配置的端口号完全一致,否则数据将被系统丢弃而无法被接收。
④ 相机 ID
填写 1。相机 ID 用于在多台追踪器同时工作时区分各设备的数据来源,通常在 1 到 9 之间任意选取。同样地,此处的相机 ID 必须与接收端配置的相机 ID 完全一致。若您同时使用多台追踪器,请为每台分配不同的 ID 以作区分。
2.2 世界原点配置
在配置页面中,点击 "世界原点" 标签页。
什么是世界原点?
世界原点是追踪坐标系的绝对基准点,对应虚拟场景(如虚幻引擎场景)中坐标 (0, 0, 0) 的位置。追踪系统会以您预先粘贴在影棚中的原点图案为参照,建立真实物理空间与虚拟三维场景之间的坐标对应关系。简单来说:影棚里原点图案贴在哪里,虚拟场景的坐标零点就在哪里。原点图案的正确粘贴与参数的准确配置,直接决定了虚实融合的精度与稳定性。
我们强烈建议您在继续配置之前,先完整阅读"【三】粘贴环境原点与特征物教程",该章节详细说明了图案的打印规格、粘贴规范,以及不同追踪器安装方向下的建议方案,是确保系统正常工作的重要前提。以下为其中的核心要点概述。
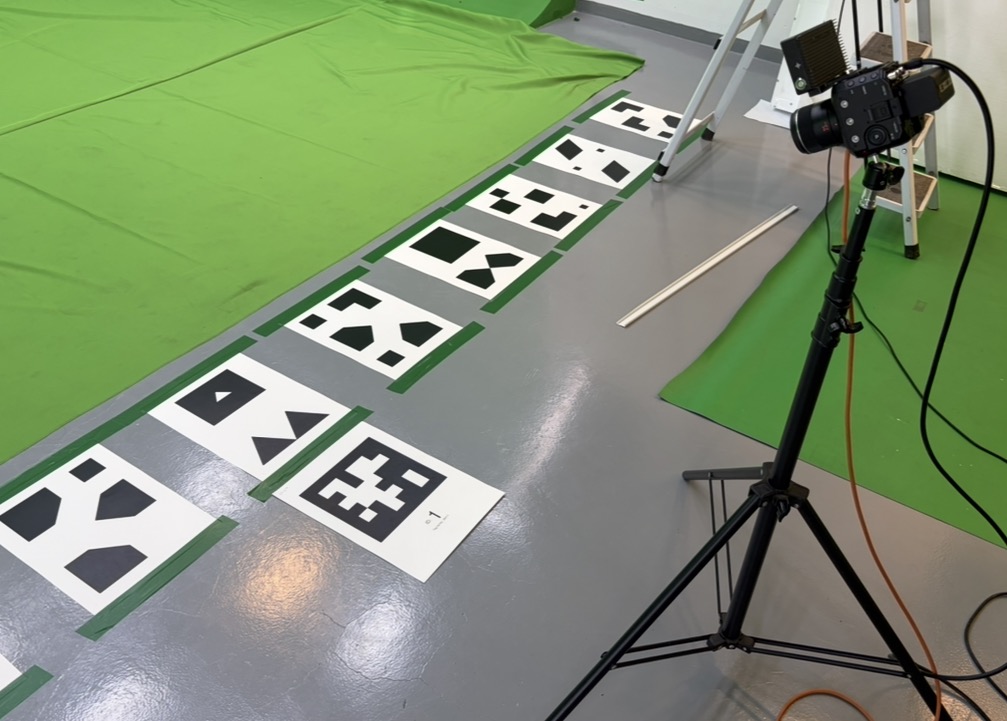
要点一:特征图案与原点图案
追踪器通过实时识别环境中预先粘贴的特征图案来定位自身位置,类似于人在房间内依靠墙上的标记判断自己所处方位。影棚内可见的特征图案数量越多、分布越均匀,追踪定位就越稳定精准。核心原则只有一条:在所有运镜过程中,追踪器视野内始终应保证不少于 5 个特征图案可见。
追踪器支持朝天安装(镜头朝向天花板)与朝前安装(镜头朝向拍摄方向)两种方式。在实际拍摄中,演员走动、摄影师移动或现场设备随时可能遮挡朝前安装的追踪器视野,在机位靠近演员或人员走动频繁的场景中尤为明显。相比之下,朝天安装的追踪器视野朝向天花板,不易被现场人员遮挡,且能稳定识别天花板上的特征图案,整体追踪表现通常更为可靠。若您的拍摄现场人员活动频繁,我们更推荐采用朝天安装方式。
原点图案的粘贴位置取决于追踪器的安装方向:若追踪器朝前安装,原点图案应粘贴在地面;若追踪器朝天安装,原点图案应粘贴在天花板。无论哪种情况,粘贴处都必须是水平的平整平面。
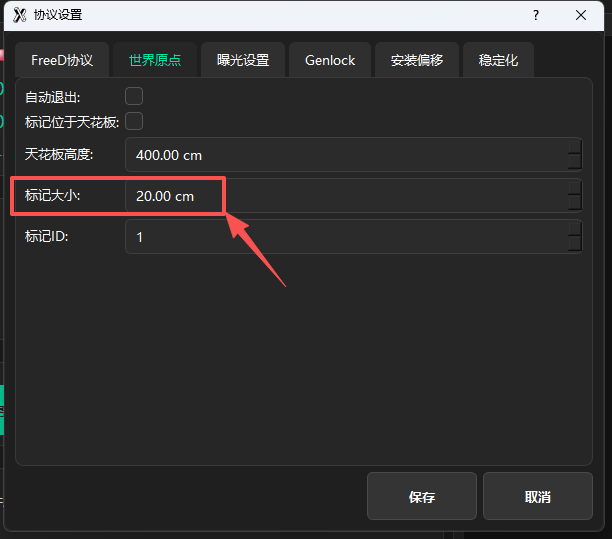
要点二:标记大小(必须填写)
打印并粘贴原点图案后,请用直尺实际测量纸张上原点图案的边长(单位:厘米,需要精确到0.1厘米),并将该数值填入"世界原点"页面的 "标记大小" 栏中。
这一步至关重要:系统通过图案在画面中的视觉大小与已知的实际边长,来精确推算摄像机与原点之间的真实距离,从而建立正确比例的世界坐标系。若此数值填写不准确,坐标系的空间比例将产生偏差,直接影响虚实融合的质量。请务必填写实际测量值,而非目测估算值。
▲ 图:测量原点图案边长示意;标记大小填写截图
要点三:追踪器朝天安装时的附加设置
若追踪器朝天安装、原点图案贴在天花板上,仅填写标记大小还不够,还需要在"世界原点"页面中进行以下附加设置:
首先勾选 "原点位于天花板",然后在对应输入框中填写地面到天花板图案粘贴位置的实际高度,最后点击"保存"。完成后,系统会自动将世界原点建立在原点图案正下方的地面位置——即使图案贴在天花板上,坐标原点仍会正确落在地面,与朝前安装时的逻辑保持一致。

▲ 图:勾选"原点位于天花板"并填写高度的截图
2.3 保存设置并重启服务
完成 FreeD 协议与世界原点的全部配置后,点击页面底部的 "保存" 按钮。程序将弹出提示,告知需要重启服务才能使新配置生效,请点击 "立刻重启" 确认。
▲ 图:保存后弹出"立刻重启"提示的截图
至此,首次运行所需的全部初始配置已完成。
三、启动追踪服务与世界原点校准
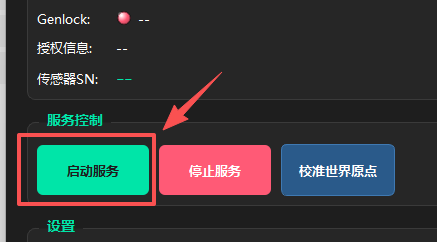
3.1 启动服务
回到程序主界面,点击 "启动服务" 按钮。此时程序将同步执行两项工作:与追踪器建立连接,以及将机器学习模块载入内存。由于机器学习模块的加载需要一定时间,请耐心等待,直到界面上的"实时 FPS"数值从 0.00 上升并稳定在 400+ 为止。FPS 稳定在 400 以上,说明机器学习模块已完成加载,追踪系统进入正常工作状态,可以进行下一步操作。
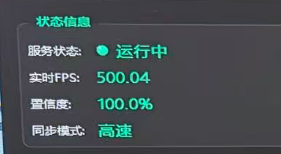
▲ 图:启动服务后 FPS 从 0 变为 400+ 的截图
如果实时 FPS 长时间停留在 0(例如等待超过 1 分钟仍无任何变化),请逐一排查以下可能原因:
遮挡问题:追踪器视野受到大面积遮挡,无法识别到任何特征图案;
光线不足:影棚环境过于昏暗,追踪器无法正常工作,建议适当补充照明;
USB 接口供电不足:追踪器所连接的 USB 接口电流不足,建议更换为主板上的直连 USB 接口,或使用带独立电源适配器的有源 USB Hub。
3.2 校准世界原点
⚠️ 重要提示:请务必等到实时 FPS 不为 0(建议达到 400+)后,再进行此步骤。
FPS 正常后,点击主界面上的 "校准世界原点" 按钮。系统将弹出一个窗口,显示追踪器摄像头的实时画面,其中包含两个视觉辅助元素:
X 形对角线:代表校准的对准中心。您需要移动或调整追踪器(或整台摄像机),使画面中 X 的交叉中心点与原点图案的中心精确对齐。
水平指示条(画面中央横杠):实时显示追踪器当前的水平状态。横杠为红色时,表示追踪器存在倾斜,校准精度会受到影响;横杠为绿色时,表示追踪器处于水平状态,此时采集的校准数据最为准确。建议在横杠变绿后再执行校准,轻微的偏转在可接受范围内,但应尽量避免明显倾斜。
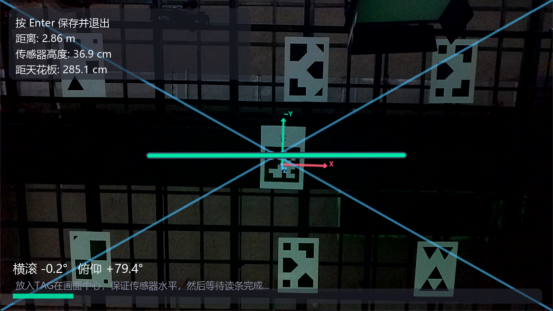
▲ 图:规范校准案例——X 对准原点图案中心,水平指示条为绿色
确认对准且横杠为绿色后,保持追踪器(或摄像机)完全静止,然后按键盘上的回车键存储校准结果。
如不便按回车键(例如追踪器安装在摄像机上,操作人员距离键盘较远),可启用自动存储功能:进入"协议设置" → "世界原点",勾选 "自动退出" 选项。启用后,完成对准并保持静止,画面底部的绿色进度条将自动累积;进度条满后,系统会自动存储校准结果,无需手动按键。
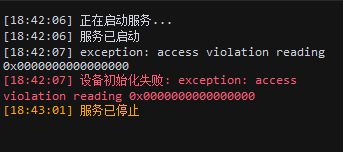
⚠️ 关于 设备初始化失败报错的处理方法
这意味着程序暂时还没有检测到追踪器,这很有可能发生在您刚刚插上追踪器后的不久,电脑还没有将推理引擎载入到追踪器内。或者您的电脑TypeC接口速率、电压较低
▲ 图:初始化失败 报错示例截图
解决方法:当把追踪器连接到您的电脑后,请耐心等待1-2分钟,然后再点击“启动服务”。另外请您一定检查追踪器与电脑的连接(连接的接口速率是否满足USB3.2 Gen1、接口电流充足)。如果等待几分钟后再点击“启动服务”,也仍然无法初始化,您可以重新插拔跟踪器,重启电脑再试一次。
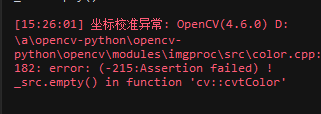
⚠️ 关于 OpenCV 报错的处理方法
若操作过程中出现带有"OpenCV"字样的错误提示(如图所示),通常意味着您在实时 FPS 仍为 0 时就点击了"校准世界原点",导致机器学习模块尚未完成加载便被提前调用,造成内部状态异常,程序无法正常工作。
▲ 图:OpenCV 报错示例截图
解决方法:关闭追踪程序,断开追踪器与电脑的连接,完整重启电脑,重新插入追踪器后再次启动程序,并等待实时 FPS 稳定在 400+ 后,再点击"校准世界原点"。
四、接入 Aximmetry 虚拟制作软件
版本说明:Aximmetry 仅 Broadcast & Film 版本支持摄像机追踪功能。请在进行以下配置前,确认您所安装的版本为 Broadcast & Film,而非 Studio 版本,两者在追踪功能上存在根本差异。
4.1 在 Aximmetry Camera Calibrator 中接入追踪器
什么是 Aximmetry Camera Calibrator?
Aximmetry Camera Calibrator 是 Aximmetry 提供的独立镜头校准工具,用于测量并记录物理摄像机镜头的光学特性——包括焦距、畸变系数、主点偏移等参数,最终生成可供 Aximmetry 读取的"镜头文件"。
在虚拟制作中,渲染引擎需要以与物理摄像机完全一致的光学参数来渲染虚拟场景,才能使虚拟内容与真实画面在视觉上无缝融合。尤其是在摄像机运动或变焦时,若镜头数据不准确,虚实边界将出现明显的透视错位与畸变不匹配,严重影响最终合成质量。因此,镜头文件在虚拟制作中至关重要,几乎所有正式制作项目都需要通过 Camera Calibrator 完成镜头校准。在 Camera Calibrator 中接入追踪器,可以让校准过程中摄像机的实时位姿数据被同步记录,从而进一步提升校准的准确性。
操作步骤:
按 Win 键打开启动菜单,在搜索框中输入
Camera Calibrator并打开。请注意:请选择 Camera Calibrator,而非 Basic Calibrator——两者功能不同,Basic Calibrator 不支持连接追踪设备。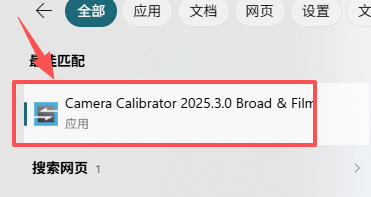
▲ 图:在启动菜单中搜索并选择 Camera Calibrator
进入 Camera Calibrator 后,点击 "设备映射器",然后在左侧列表中点击 Camera Tracking,再点击 "管理设备"。
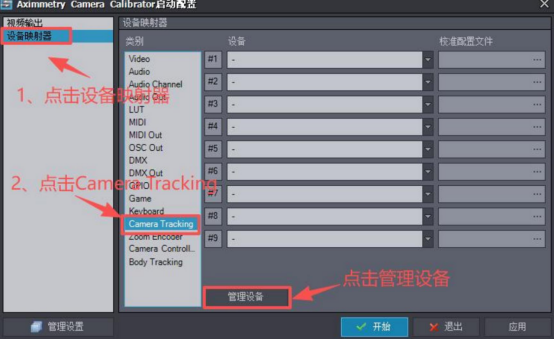
▲ 图:设备映射器界面
在管理设备页面中,找到 Camera Tracking 类别,在类型下拉菜单中选择 Free-D,然后点击 "新增"。
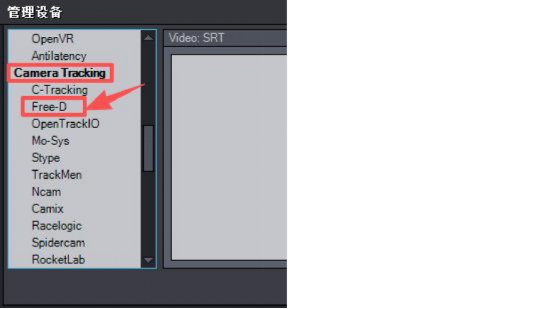
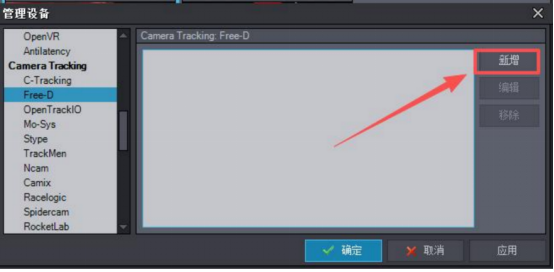
▲ 图:选择 Free-D 并点击新增
在弹出的配置页面中进行如下填写:勾选 UDP(追踪程序通过 UDP 协议发送数据);在"UDP 端口"中输入
40001(须与追踪程序"FreeD 协议"中设置的端口号一致);在"摄影机 ID"中输入1(须与追踪程序"FreeD 协议"中设置的相机 ID 一致);完成后点击 "确定"。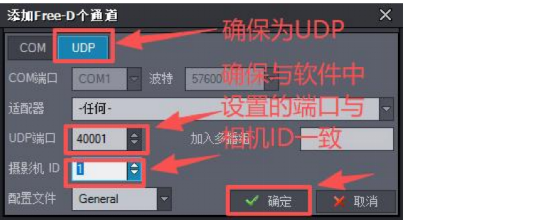
▲ 图:UDP 配置填写截图
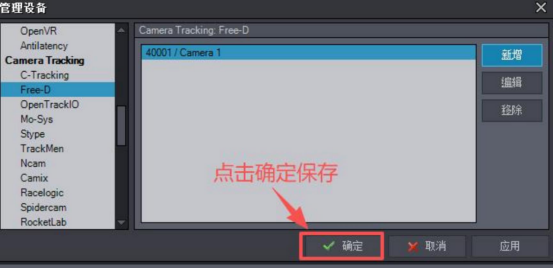
在返回的管理设备页面中,点击 "确定" 确认。
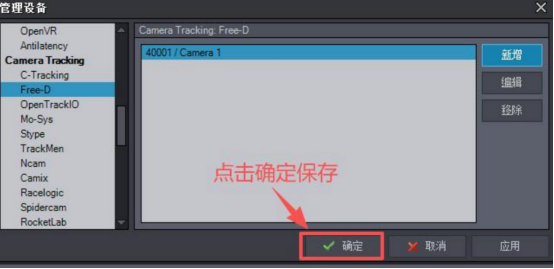
▲ 图:管理设备页面点击确定
回到设备映射器的 Camera Tracking 区域,点击设备下拉选框,您将看到刚才新增的 Free-D 设备,勾选即可完成绑定。

▲ 图:在下拉框中勾选新增的 Free-D 设备
如需深入了解 Aximmetry Camera Calibrator 的完整镜头校准流程,可参考我们提供的视频教程,其中详细讲解了相机镜头校准的各个步骤与要点。
4.2 在 Aximmetry Composer 中接入追踪器
Aximmetry Composer 是 Aximmetry 的核心制作环境,日常虚拟制作的合成、实时渲染与信号输出均在此完成。以下说明如何在启动 Composer 时接入追踪器。
操作步骤:
按 Win 键打开启动菜单,在搜索框中输入
Aximmetry Composer并打开。
▲ 图:在启动菜单中搜索并打开 Aximmetry Composer
在 Aximmetry Composer 的启动配置页面中,点击底部的 "管理设备"。
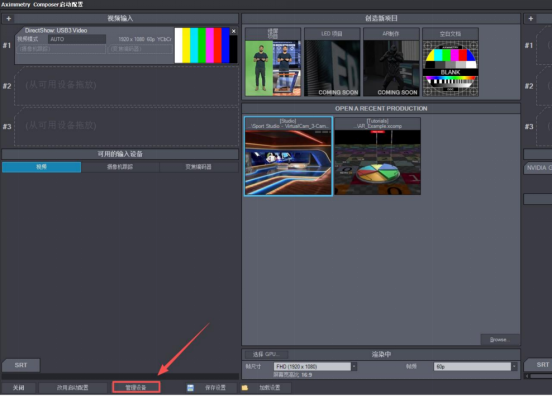
▲ 图:启动配置页面,管理设备按钮位置
在管理设备页面中,找到 Camera Tracking 类别,在类型下拉菜单中选择 Free-D,然后点击 "新增"。
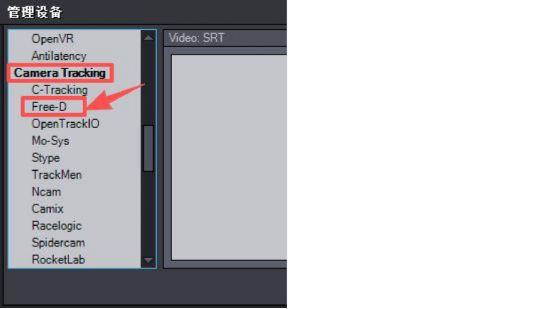
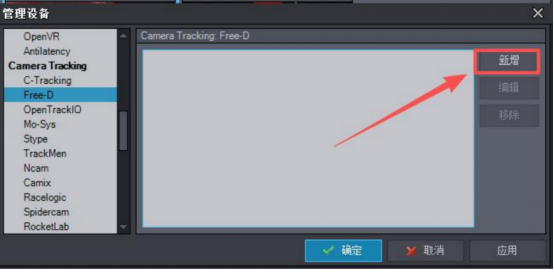
▲ 图:选择 Free-D 并点击新增
在弹出的配置页面中:勾选 UDP;在"UDP 端口"中输入
40001(须与追踪程序"FreeD 协议"中设置的端口一致);在"摄影机 ID"中输入1(须与追踪程序"FreeD 协议"中设置的相机 ID 一致);完成后点击 "确定"。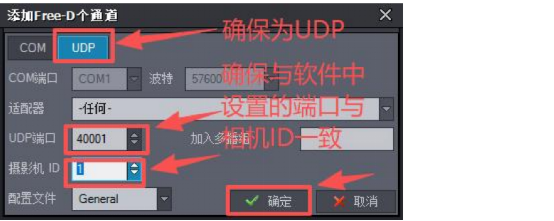
▲ 图:UDP 配置填写截图
在返回的管理设备页面中,点击 "确定" 确认。
▲ 图:管理设备页面点击确定
页面回到 Aximmetry Composer 启动配置,点击左侧的 "摄像机追踪" 选项卡。

▲ 图:点击摄像机追踪选项卡
将新增的 Free-D 设备拖动到右侧"视频输入 - 采集卡"下对应的 "摄像机追踪" 栏中,完成追踪器与视频输入通道的绑定。
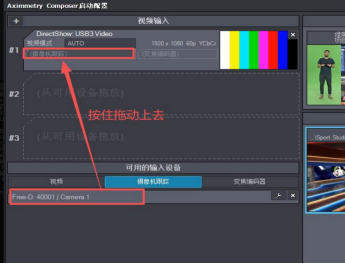
▲ 图:将 Free-D 设备拖入摄像机追踪栏的截图
如需进一步了解 Aximmetry 追踪功能的更多配置与进阶用法,欢迎观看我们的视频教程。